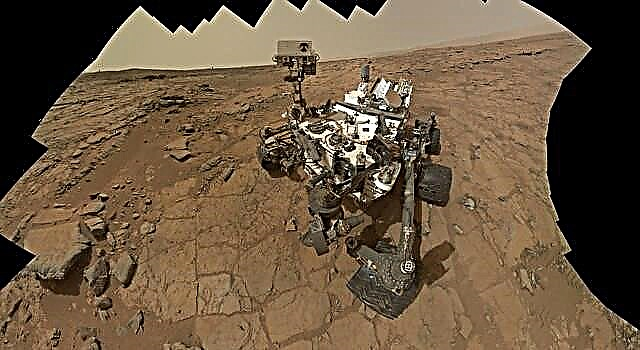
Zo?, Một rover chạy bằng năng lượng mặt trời tự trị. Tín dụng hình ảnh: NASA Bấm để phóng to
Các nhà nghiên cứu của Đại học Carnegie Mellon và các đồng nghiệp của họ từ Trung tâm nghiên cứu Ames của NASA, các trường đại học Tennessee, Arizona và Iowa, cũng như các nhà nghiên cứu Chile tại Đại học Catolica del Norte (Antofagasta) đang chuẩn bị cho giai đoạn cuối cùng của dự án ba năm để phát triển nhà sinh vật học robot nguyên mẫu, một robot có thể khám phá và nghiên cứu cuộc sống trên sa mạc khô cằn nhất trên Trái đất.
Nhóm nghiên cứu sẽ chỉ đạo và giám sát Zo?, Một chiếc máy bay chạy bằng năng lượng mặt trời tự trị được phát triển tại Carnegie Mellon, khi nó di chuyển 180 km trên sa mạc Chile Thoát Atacama. Zo? được trang bị các dụng cụ khoa học để tìm kiếm và xác định vi sinh vật và đặc trưng cho môi trường sống của chúng. Nó sẽ sử dụng chúng khi nó khám phá ba vùng khác nhau của sa mạc trong thời gian lưu trú hai tháng, kéo dài từ 22 tháng 8 đến 22 tháng 10.
Kết quả của cuộc thám hiểm này cuối cùng có thể cho phép các robot trong tương lai tìm kiếm sự sống trên Sao Hỏa, cũng như cho phép khám phá thông tin mới về sự phân bố sự sống trên Trái Đất.
Dự án tìm kiếm sự sống đã được bắt đầu vào năm 2003 trong Chương trình Khoa học và Công nghệ Sinh học của NASA để khám phá các hành tinh, hay ASTEP, tập trung vào việc đẩy các giới hạn của công nghệ để nghiên cứu sự sống trong môi trường khắc nghiệt.
Các khả năng của Zo? Hiện đại diện cho đỉnh cao của ba năm làm việc để xác định thiết kế, phần mềm và thiết bị tối ưu cho một robot có thể tự điều tra các môi trường sống khác nhau. Trong mùa giải năm 2004, Zo? vượt quá mong đợi của các nhà khoa học khi họ di chuyển 55 km một cách tự động và phát hiện các sinh vật sống bằng cách sử dụng Máy phát huỳnh quang trên tàu (FI) để xác định vị trí của diệp lục và các phân tử hữu cơ khác.
Mục tiêu của chúng tôi với cuộc điều tra cuối cùng này là phát triển một phương pháp để tạo ra một "bản đồ" địa hình 3D thời gian thực ở cấp độ vi mô, ông nói, ông Nathalie Cabrol, một nhà khoa học hành tinh tại NASA Ames và Viện SETI, người đứng đầu ngành khoa học khía cạnh điều tra của dự án. Bản đồ này cuối cùng có thể được tích hợp với dữ liệu vệ tinh để tạo ra một công cụ chưa từng có cho các nghiên cứu về các hoạt động môi trường quy mô lớn về cuộc sống ở các khu vực cụ thể. Khái niệm này có thể được áp dụng cho nghiên cứu hành tinh và cả trên Trái đất để khám phá các môi trường khắc nghiệt khác.
Đây là lần đầu tiên robot tìm kiếm sự sống, Giáo sư David Wettergreen, phó giáo sư nghiên cứu của Carnegie Mellon, người đứng đầu dự án cho biết. Trước đây, chúng tôi đã làm việc với rovers và dụng cụ cá nhân, nhưng Zo? là một hệ thống hoàn chỉnh để tìm kiếm sự sống. Chúng tôi đang nỗ lực để tự chủ hoàn toàn cho các hoạt động của mỗi ngày, bao gồm lập thời gian và sử dụng tài nguyên, kiểm soát việc triển khai công cụ và điều hướng giữa các khu vực nghiên cứu.
Năm ngoái, chúng tôi đã biết rằng Imager huỳnh quang có thể phát hiện các sinh vật trong môi trường này. Năm nay chúng tôi sẽ có thể thấy một khu vực đông dân cư sinh sống và lập bản đồ phân bố của chúng. Chúng tôi dự định sẽ cho robot thực hiện tới 100 quan sát và tiến bộ trong các phát triển thủ tục như làm thế nào để quyết định nơi khám phá.
Zo? sẽ đến thăm một vùng ven biển đầy sương mù, altiplano khô và một khu vực trong sa mạc cạn khô cằn không nhận được lượng mưa trong nhiều thập kỷ. Tại các địa điểm này, các hoạt động của rover sẽ được hướng dẫn từ xa từ một trung tâm hoạt động ở Pittsburgh, nơi các nhà nghiên cứu sẽ mô tả đặc điểm môi trường, tìm kiếm bằng chứng rõ ràng về sự sống và lập bản đồ phân bố các môi trường sống khác nhau. Trong nhiệm vụ năm ngoái, nhóm nghiên cứu đã thực hiện các thí nghiệm sử dụng thiết bị chụp ảnh có thể phát hiện huỳnh quang ở một khu vực bên dưới rover. FI phát hiện tín hiệu từ hai thuốc nhuộm huỳnh quang đánh dấu carbohydrate và protein? cũng như sự phát huỳnh quang tự nhiên của diệp lục. FI, được phát triển bởi Alan Wagoner, giám đốc của trường đại học Trung tâm sinh học và hình ảnh phân tử (MBIC), đã không hoàn toàn tự động vào năm ngoái. Các nhà khoa học đã phải theo dõi rover và phun thuốc nhuộm lên khu vực mẫu. Năm nay, Zo? có thể phun hỗn hợp thuốc nhuộm cho DNA, protein, lipid và carbohydrate mà không cần sự can thiệp của con người.
Dự án Life in the Atacama được tài trợ với khoản tài trợ 3 triệu đô la trong ba năm từ NASA cho Viện Robotics Carnegie Mellon trong Trường Khoa học Máy tính. Họ hợp tác với các nhà khoa học MBIC, người đã nhận được khoản tài trợ 900.000 USD của NASA để phát triển thuốc nhuộm huỳnh quang và kính hiển vi tự động để định vị các dạng sống khác nhau.
Nhóm khoa học sử dụng EventScope, một trình duyệt trải nghiệm từ xa được phát triển bởi các nhà nghiên cứu tại STUDIO cho Câu hỏi sáng tạo trong Đại học Mỹ thuật Carnegie Mellon, để hướng dẫn Zo?. Nó cho phép các nhà khoa học và công chúng trải nghiệm môi trường Atacama thông qua bộ máy điều khiển trong mắt và các cảm biến khác nhau. Trong quá trình điều tra thực địa, các nhà khoa học sẽ tương tác với Zo? trong một phòng điều khiển hoạt động khoa học tại Phòng thí nghiệm và học tập từ xa ở Pittsburgh. Các nhà khoa học từ NASA, Phòng thí nghiệm Động cơ phản lực, Đại học Tennessee, Đại học Arizona, Khảo sát Nam Cực của Anh và Cơ quan Vũ trụ châu Âu sẽ tham gia.
Để biết thêm thông tin, hình ảnh và báo cáo thực địa từ Atacama, hãy truy cập: www.frc.ri.cmu.edu/atacama.
Nguồn gốc: Carnegie Mellon Tin tức phát hành