Một nhóm các kỹ sư người Mỹ và Canada kết hợp đã tiến một bước lớn đầu tiên bằng cách áp dụng thành công nghiên cứu robot mới, loại đầu tiên đã tiến hành trên Trạm vũ trụ quốc tế (ISS) để sửa chữa và tiếp nhiên liệu cho các vệ tinh không gian quay quanh có giá trị cao và có khả năng một ngày nào đó sẽ mang lại hàng tỷ đô la tiết kiệm chi phí cho chính phủ và các lĩnh vực không gian thương mại.
Các nhà nghiên cứu hăng hái từ cả hai quốc gia đã hét lên Yeah Yeah !!! - sau khi sử dụng thành công thí nghiệm Nhiệm vụ tiếp nhiên liệu robot (RRM) - được chốt bên ngoài ISS - như một giường thử nghiệm công nghệ để chứng minh rằng một robot được điều khiển từ xa trong chân không có thể thực hiện các nhiệm vụ công việc tinh vi cần điều khiển chuyển động cực kỳ chính xác. Thí nghiệm robot mang tính cách mạng có thể kéo dài tuổi thọ hoạt động có thể sử dụng của các vệ tinh đã có trên quỹ đạo Trái đất mà thậm chí không bao giờ có ý định thực hiện.
Sau khi dành nhiều tháng thời gian chuyên nghiệp và cá nhân cho RRM, đó là một cảm xúc tuyệt vời và tôi rất yên tâm khi xem luồng video đầu tiên từ một công cụ RRM, anh cho biết Justin Cassidy trong một cuộc phỏng vấn chuyên sâu với Tạp chí Vũ trụ. Cassidy là Giám đốc phần cứng RRM tại Trung tâm vũ trụ Goddard của NASA ở Greenbelt, Maryland.

Và nhóm RRM đã có kế hoạch thực hiện các thử nghiệm thậm chí còn tham vọng hơn ngay từ mùa hè này, bao gồm cả việc truyền chất lỏng rất được mong đợi để mô phỏng việc tiếp nhiên liệu vệ tinh thực tế có thể biến đổi các ứng dụng robot trong không gian - xem chi tiết bên dưới!
Tất cả các hoạt động robot tại nhà ga được điều khiển từ xa bởi những người điều khiển chuyến bay từ mặt đất. Mục đích của điều khiển từ xa và robot là để giải phóng phi hành đoàn con người ISS để họ có thể làm việc trên các hoạt động quan trọng khác và thực hiện các thí nghiệm khoa học đòi hỏi sự can thiệp và suy nghĩ của con người tại chỗ.

Trong khoảng thời gian ba ngày từ 7 đến 9 tháng 3, các kỹ sư đã thực hiện các hoạt động chung giữa thí nghiệm Nhiệm vụ tiếp nhiên liệu robot (RRM) của NASA và cơ quan điều khiển robot của Cơ quan Vũ trụ Canada (CSA) - robot Dextre. Dextre được chính thức đặt tên là SPDM hoặc Bộ điều khiển khéo léo có mục đích đặc biệt.
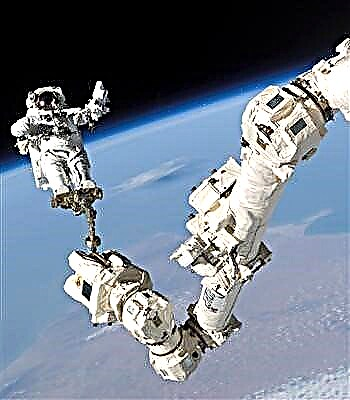
Vào ngày đầu tiên, các nhà điều hành robot trên Trái đất đã điều khiển từ xa chiếc máy điều khiển Dextre siêu dài 12 feet (3,7 mét) đến thí nghiệm RRM bằng cách sử dụng cánh tay robot (SSRMS) do trạm vũ trụ Canada chế tạo.
Dextre cảm ứng trên tay - được gọi là kỹ thuật của OT OTV - sau đó nắm và kiểm tra ba công cụ vệ tinh chuyên dụng khác nhau được đặt trong thiết bị RRM. Các đánh giá toàn diện về cơ và điện của Công cụ mũ an toàn, Công cụ thao tác cắt dây và chăn và Công cụ đa chức năng cho thấy cả ba công cụ này đều hoạt động hoàn hảo.

Các đội của chúng tôi đã lắp một cách máy móc robot Robot Dextre của Canada trong thời gian ngắn vào tay Công cụ mũ an toàn RRM (SCT). RRM SCT là đơn vị trên quỹ đạo đầu tiên sử dụng khả năng video của tay OTCM của Dextre, ông Cass Cassidy giải thích.
Khi bắt đầu vận hành dụng cụ, các bộ điều khiển nhiệm vụ đã lái một cách cơ học chiếc rốn điện OTCM trước để kết hợp nó với hộp điện tử tích hợp SCT. Khi sức mạnh được áp dụng cho giao diện đó, nhóm của chúng tôi đã có thể thấy điều đó trên TV màn hình lớn Goddard, video video ánh sáng đầu tiên của SCT bằng cách hiển thị một cảnh quay của công cụ trong khoang xếp hàng RRM (xem ảnh).

Đội của chúng tôi đã nổ ra một tiếng hét để khen ngợi việc kiểm tra hệ thống chức năng điện thành công này.
Sau đó, Dextre đã thực hiện các nhiệm vụ các loại nhằm mục đích kiểm tra mức độ đa dạng của các phụ kiện khí, van, dây và con dấu nằm ở bên ngoài mô-đun RRM. Nó đã phát hành khóa khởi động an toàn và cắt tỉ mỉ hai dây khóa vệ tinh cực mỏng - làm bằng thép - và có đường kính chỉ 20 phần nghìn inch (0,5 mm).
Sự kiện cắt dây chỉ kéo dài vài phút. Nhưng cả hai nhiệm vụ cắt dây mất khoảng 6 giờ phối hợp, hoạt động robot an toàn. Dây khóa đã được định tuyến, xoắn và buộc trên mặt đất tại giao diện của Ambient Cap và T-Valve trước chuyến bay, theo ông Cassidy.
Bài tập RRM này đại diện cho lần đầu tiên robot Dextre được sử dụng cho một dự án nghiên cứu và phát triển công nghệ trên ISS, một sự mở rộng lớn về khả năng của nó ngoài khả năng bảo trì robot của tiền đồn quay quanh quỹ đạo khổng lồ.
Chú thích video: Nhiệm vụ tiếp nhiên liệu robot của Dextre nam: Ngày 2. Ngày thứ hai của nhiệm vụ đòi hỏi khắt khe nhất của Dextre, đã kết thúc thành công vào ngày 8 tháng 3 năm 2012 khi người siêng năng robot hoàn thành ba nhiệm vụ được giao. Tín dụng: NASA / CSA

Tổng cộng ba ngày hoạt động mất khoảng 43 giờ và tiến hành nhanh hơn dự kiến vì chúng gần với danh nghĩa như mong đợi.
Charles Ngày 1 và 2 đã chạy khoảng 18 giờ, Charles cho biết Charles Bacon, Kỹ sư trưởng / Hệ thống hoạt động RRM tại NASA Goddard, cho Tạp chí Vũ trụ. Ngày thứ 3 đã chạy khoảng 7 giờ kể từ khi chúng tôi hoàn thành mọi nhiệm vụ sớm. Tất cả ba ngày cơ bản 18 giờ, với nhóm làm việc theo hai ca. Vì vậy, thời gian đã được như mong đợi, và thực sự tốt hơn một chút kể từ khi chúng tôi hoàn thành sớm vào ngày cuối cùng.

Trong vài tháng qua, nhóm của chúng tôi đã tạo tiền đề cho các cuộc biểu tình trên quỹ đạo RRM, kể từ đó, Cass Cassidy nói với tôi. Giống như một nhà sản xuất nhà hát, chúng tôi có nhiều kỹ sư đằng sau hậu trường đã hỗ trợ phát triển và tiếp tục là một phần của các hoạt động RRM trên quỹ đạo.
Ở mỗi giai đoạn của RRM, từ việc chuẩn bị, giao hàng, cài đặt và bây giờ là các hoạt động mà tôi đang sử dụng bởi những nỗ lực to lớn mà nhiều đội ngũ đa dạng đã góp phần tạo ra RRM. Văn phòng Khả năng Phục vụ Vệ tinh tại Trung tâm Hàng không Vũ trụ NASA NASA Goddard đã hợp tác với Trung tâm Vũ trụ Johnson, Trung tâm Vũ trụ Kennedy (KSC), Trung tâm Bay Không gian Marshall và Trung tâm Điều khiển Cơ quan Vũ trụ Canada ở St. Hubert, Quebec để biến RRM thành hiện thực.
Sự thành công của các hoạt động RRM cho đến nay trên Trạm vũ trụ quốc tế (ISS) sử dụng Dextre là một minh chứng cho sự xuất sắc của NASA, nhiều tổ chức và đối tác của NASA, giải thích.
Nhiệm vụ loại bỏ các phụ kiện khí đốt trong ba ngày, nhiệm vụ của mình là một mô phỏng ban đầu để thực hành các kỹ thuật cần thiết để sửa chữa các vệ tinh bị trục trặc và tiếp nhiên liệu cho các vệ tinh đang hoạt động trên danh nghĩa để kéo dài thời gian thực hiện trong vài năm.
Kỹ thuật viên trên mặt đất sử dụng các phụ kiện và van để nạp tất cả các chất lỏng, khí và nhiên liệu thiết yếu vào bể chứa vệ tinh trước khi phóng và sau đó được niêm phong, đậy kín và thường không bao giờ được truy cập lại.
Frank Cepollina, phó giám đốc của Văn phòng khả năng phục vụ vệ tinh (SSCO) tại Trung tâm bay không gian vũ trụ của NASA ở Greenbelt, Md cho biết, không thể nói quá nhiều.
Các công nghệ phục vụ vệ tinh của Fresh Fresh sẽ được trình diễn trong môi trường không gian thực trong vòng vài tháng thay vì nhiều năm. Điều này là rất lớn. Nó đại diện cho sự tiến bộ thực sự trong tiến bộ công nghệ vũ trụ.
Bốn thí nghiệm RRM sắp tới dự kiến được thiết lập cho năm nay sẽ chứng minh khả năng của một robot điều khiển từ xa để loại bỏ các rào cản và tiếp nhiên liệu cho các bình chứa khí vệ tinh rỗng trong không gian, nhờ đó tiết kiệm được phần cứng đắt tiền từ việc gia nhập quỹ đạo sớm.
Thời điểm của các hoạt động RRM trong tương lai có thể gặp nhiều thách thức và phụ thuộc vào sự sẵn có của Dextre và chi nhánh SSRMS cũng được đặt nhiều cho các hoạt động ISS đang diễn ra khác như tàu vũ trụ, hoạt động bảo trì và thí nghiệm khoa học cũng như neo đậu và / hoặc dỡ hàng ổn định dòng hàng hóa tiếp tế hàng hóa quan trọng như tàu tiến, ATV, HTV, Dragon và Cygnus.
Tính linh hoạt là chìa khóa cho tất cả các hoạt động của ISS. Và mặc dù phi hành đoàn nhà ga không liên quan đến RRM, các hoạt động của họ có thể.
Trong khi bản thân phi hành đoàn không phụ thuộc vào Dextre cho các hoạt động của họ, các op của Dextre có thể gián tiếp ảnh hưởng đến những gì phi hành đoàn có thể hoặc có thể làm được, ông Bac Bacon nói với tôi. Ví dụ, trong các hoạt động RRM của chúng tôi, phi hành đoàn không thể thực hiện một số hoạt động thể dục nhất định vì cách chuyển động đó có thể ảnh hưởng đến chuyển động của Dextre.
Dưới đây là danh sách các hoạt động RRM sắp tới - các ràng buộc về lịch trình ISS đang chờ xử lý:
* Tiếp nhiên liệu (mùa hè 2012) - Sau khi Dextre mở một van nhiên liệu tương tự như các loại thường được sử dụng trên vệ tinh ngày nay, nó sẽ chuyển ethanol lỏng vào nó thông qua một ống nhiên liệu robot tinh vi.
* Thao tác chăn nhiệt (TBD 2012) - Dextre sẽ thực hành cắt băng dính chăn nhiệt và gấp lại một tấm chăn nhiệt để lộ nội dung bên dưới.
* Loại bỏ vít (Fastener) (TBD 2012) - Dextre sẽ tháo gỡ các bu lông vệ tinh (ốc vít).
* Loại bỏ nắp điện (TBD 2012) - Dextre sẽ loại bỏ các nắp thường bao phủ một ổ cắm điện vệ tinh.
RRM đã được đưa lên quỹ đạo bên trong khoang chở hàng của tàu con thoi Atlantis trong tháng 7 năm 2011 trong nhiệm vụ tàu con thoi cuối cùng (STS-135) của chương trình tàu con thoi kéo dài ba thập kỷ của NASA và sau đó được đặt trên một nền tảng làm việc bên ngoài trên giàn xương sống ISS bởi các phi hành gia. Dự án là một nỗ lực chung giữa NASA và CSA.
Đây là những gì thành công là tất cả về. Với RRM, chúng tôi đang thực sự mở đường cho việc thăm dò robot và phục vụ vệ tinh trong tương lai, ông Cass Cassidy kết luận.

…….
24 tháng 3 (Thứ bảy): Bài giảng miễn phí của Ken Kremer tại Hiệp hội Thiên văn New Jersey, Công viên bang Voorhees, NJ lúc 8 giờ 30 tối. Chủ đề: Atlantis, Chương trình tàu con thoi cuối châu Mỹ, RRM, Orion, SpaceX, CST-100 và Tương lai của tàu vũ trụ người và robot của NASA