Nếu bạn đã xem các hình ảnh HiRISE có độ phân giải cao từ Tàu thám hiểm sao Hỏa hoặc có cơ hội khám phá Google Mars mới, bạn sẽ biết sao Hỏa có nhiều miệng núi lửa, núi, mòng biển và tất cả các loại địa hình thú vị - và nguy hiểm - . Các khu vực như những khu vực có lớp trầm tích, trầm tích, nứt vỡ và đứt gãy chỉ là loại nơi để tìm kiếm nguồn khí mêtan đang được sản xuất trên sao Hỏa. Nhưng nó rất nguy hiểm khi gửi phong cách của các tay đua hiện tại của chúng tôi, bao gồm cả Phòng thí nghiệm Khoa học Sao Hỏa (MSL) năm 2011, vào địa hình hiểm trở. Nhưng các kỹ sư từ JPL, cùng với các sinh viên của Học viện Công nghệ California đã thiết kế và thử nghiệm một robot linh hoạt, khối lượng thấp, có thể được thêm vào các máy bay lớn hơn như MSL có thể vượt qua các vách đá, di chuyển nhanh trên địa hình dốc và đá, và khám phá miệng hố sâu.
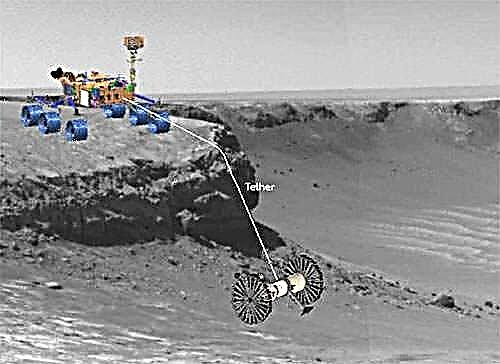
Nguyên mẫu rover này, được gọi là Axel, có thể giúp tàu vũ trụ robot trong tương lai khám phá và điều tra tốt hơn các thế giới nước ngoài như Sao Hỏa. Trên trái đất, Axel có thể hỗ trợ các hoạt động tìm kiếm và cứu hộ.
Nhà nghiên cứu chính của Axel, Issa A.D. Nesnas, thuộc bộ phận robot và di động của JPL, cho biết. Ngoài ra, bởi vì Axel có khối lượng tương đối thấp, một nhiệm vụ có thể mang theo một số động cơ Axel. Điều đó sẽ cho chúng tôi cơ hội tích cực hơn với địa hình mà chúng tôi sẽ khám phá, trong khi vẫn giữ được rủi ro tổng thể.
Nesnas cho biết Axel giống như một yo-yo - nó nằm trên một dây buộc gắn với một chiếc đu quay lớn hơn và có thể đi lên và xuống các bên của miệng núi lửa, hẻm núi và mòng biển, khám phá các khu vực không an toàn cho các tay đua khác.

Thiết kế đơn giản và thanh lịch của Axel, có thể vận hành cả lộn ngược và phải lên, chỉ sử dụng ba động cơ: một để điều khiển mỗi hai bánh xe và một phần ba để điều khiển một đòn bẩy. Đòn bẩy chứa một muỗng để thu thập vật liệu mặt trăng hoặc hành tinh để các nhà khoa học nghiên cứu, và nó cũng điều chỉnh robot Robot hai camera âm thanh nổi, có thể nghiêng 360 độ.

Thân hình trụ Axel sườn có khả năng liên lạc điện toán và không dây và cảm biến quán tính để hoạt động tự chủ. Nó cũng có một dây buộc mà Axel có thể tháo ra để hạ xuống từ một tàu đổ bộ, rover hoặc điểm neo lớn hơn. Rover có thể sử dụng các loại bánh xe khác nhau, từ bánh xe lớn có thể gập lại đến bánh xe bơm hơi, giúp người lái chịu được hạ cánh cứng và xử lý địa hình đá.
Axel đã được phát triển từ năm 1999, và các sinh viên từ Caltech, Đại học Purdue và Đại học Công nghệ Arkansas đã hợp tác với JPL trong những năm qua để phát triển rover linh hoạt này.
Để biết thêm thông tin về Axel, hãy xem trang JPL từ Axel và trang web Caltech từ Axel.